Forces and Moments
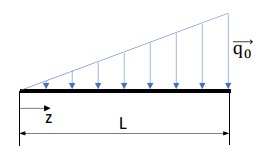
A force applied on a line can have a uniform or variable distribution . The unit for is .
Example: Linear Distribution
Moments
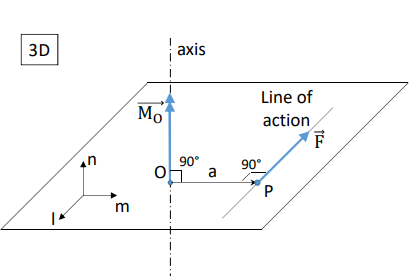
Definition
An action defined by a force that causes rotation about a given axis. The unit is
Where is called the arm — it is the position vector of the force’s application point relative to the rotation’s pivot.
Static equilibrium
A body is in static equilibrium when the following holds:
Note
In 2D, that’s 3 equations (2 for translation, 1 for rotation), while for 3D it’s 6 equations.
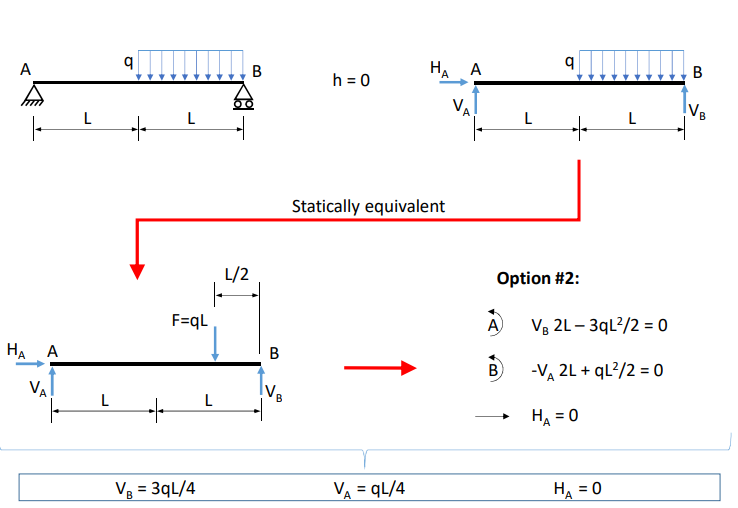
Static Equivalence
Definition
Two bodies are statically equivalent if they have the same resultant force and moment.
Two forces of:
- Equal amplitude
- Equal direction
- Opposite versus
- Different lines of actions are statically equivalent to a moment where is the distance between the two forces. The moment is applied in the middle between the two forces.
Any set of forces on a body are equivalent to a linearly independent set of forces and moments. This is the equivalent force moment system.
Determinacy of Structures
In a structure of interconnected bodies with available degrees of freedom (DOF), and constraints that inhibit DOFs, the degree of static determinacy is:
What does mean?
- : Not enough constraints to keep the structure static. It is therefore statically impossible or kinematically indeterminated.
- : The structure has no free DOFs, and is therefore statically determinated.
- : There are more constraints than needed to block motion. It is therefore statically indeterminated. However, we need extra equations to solve the system due to forces caused by deformations. (Virtual works principle)
WARNING
does NOT guarantee that the structure is statically determinated.
For the example on the bottom right, the movement might be very small, but we consider infinitesimal movement to cause kinematic indeterminacy.
Solving Structures (2D)
Definition
Solving a structure means calculating the unknown reaction forces (and moments) exerted by supports to maintain the body in equilibrium.
Flowgraph
graph TD Start([Start Problem]) --> Step1["(1) Compute degree of <br/>static determinacy h"] Step1 --> CheckH{"Check h"} CheckH -- "h > 0" --> Stop1["STOP: Hyperstatic System"] CheckH -- "h < 0" --> Labile{"Do actions excite <br/> rigid motion?"} Labile -- Yes --> Stop2["STOP: Mechanism"] CheckH -- "h = 0" --> Iso{"Is rigid <br/> motion allowed?"} Iso -- Yes --> Stop3["STOP: Bad Constraints"] Labile -- No --> Step2 Iso -- No --> Step2 subgraph Execution ["The Solution Workflow"] direction TB Step2["(2) Compute External & <br/>Internal Reactions"] --> Step3["(3) Define Coordinate System <br/> (along the beam)"] Step3 --> Step4["(4) Define Segments <br/> (Identify discontinuities)"] Step4 --> Step5["(5) Section Each Segment <br/> (Expose Internal Actions N, T, M)"] Step5 --> Step6["(6) Compute Internal Functions <br/> (Equilibrium of the cut piece)"] Step6 --> Step7(["(7) Plot the Diagrams"]) end
1. Check Static Determinacy ()
- (Hyperstatic): STOP. Equilibrium equations are insufficient.
- (Labile): STOP. Mechanism forms (unless loads avoid exciting motion).
- (Isostatic): Proceed, provided no rigid motion is allowed.
2. Free Body Diagram (FBD)
- Remove supports and replace them with unknown reaction vectors ().
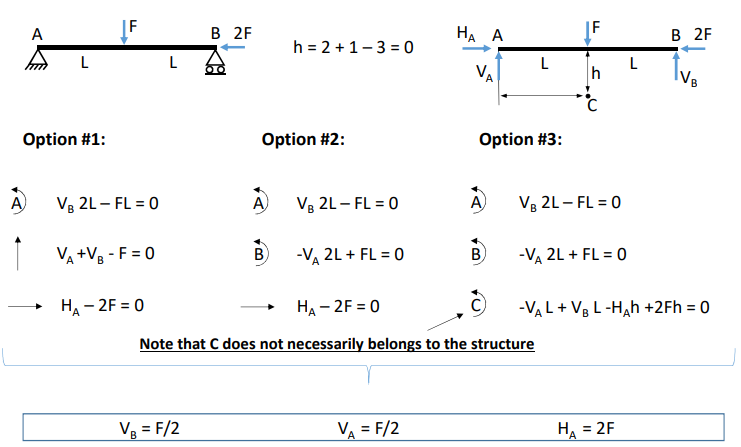
3. Equilibrium Equations (Options)
Select one set to solve for unknowns. Tip: Aim for uncoupled equations (1 unknown per equation).
- Option 1 (Standard): 2 Forces () + 1 Moment ().
- Option 2: 2 Moments () + 1 Force (not to ).
- Option 3: 3 Moments () (points not aligned).
4. Assemblies (Multiple Interconnected Bodies)
When a structure consists of multiple rigid bodies connected by internal constraints (e.g., hinges), you must account for internal reactions.
A. Rule for Internal Reactions
Newton's Third Law
Internal reactions on Body #1 must be EQUAL and OPPOSITE to the internal reactions on Body #2.
- If points left on Body #1, it MUST point right on Body #2.
- When the whole structure is re-assembled, these internal forces vanish.
B. Views for Analysis
- Whole Structure View: Shows only external supports. Internal hinges are hidden. Useful if total external unknowns .
- Exploded View (Single Bodies): Shows internal reactions at connections. Total equations available = .
C. Solving Strategies
You need as many equations as there are unknowns (External + Internal).
-
Option A (Hybrid):
- Write 3 equations for the Whole Structure (ignores internal forces).
- Write 3 equations for One Body (reveals internal forces).
- Use when: The entire structure allows you to find some external reactions immediately.
-
Option B (Exploded):
- Write 3 equations for Body #1.
- Write 3 equations for Body #2.
- (3 additional equations for every body added)
- Strategy: Look for the “weak link” body (the one with only 3 unknowns) and solve that one first. Then transfer the values to the connected body.
Examples
Bodies
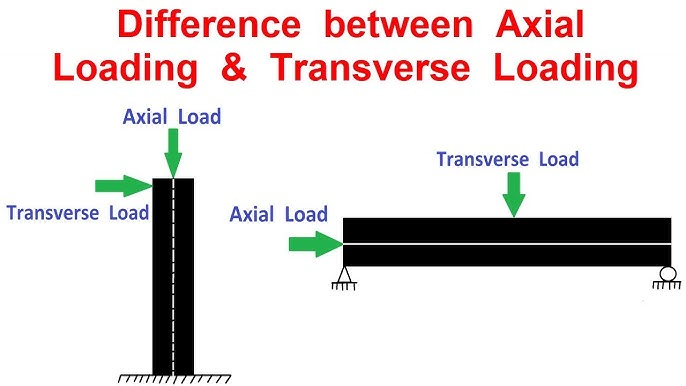
Beams
A Beam is a “slender” body where the Axial Length is significantly larger than the Transverse Dimensions (cross-section).
- Criterion: Length 10 to 30+ times the width.
- Axis: The line running along the axial direction.
Definition
The axis of a body with a straight axis is the locus of the centroid of cross-sections.